
Raspberry Pi 5 Specifications
| Processor | Broadcom BCM2712 – Quad-core Arm Cortex-A76 (64-bit) |
|---|---|
| Clock Speed | 2.4 GHz |
| GPU | VideoCore VII |
| RAM Options | 4GB or 8GB LPDDR4X |
| Networking |
Gigabit Ethernet Wi-Fi 5 (802.11ac) Bluetooth 5.0 / BLE |
| USB Ports |
2 × USB 3.0 2 × USB 2.0 |
| Video Output | 2 × micro-HDMI (up to 4Kp60) |
| Storage |
microSD card slot PCIe 2.0 x1 (NVMe via HAT) |
| Camera/Display | 2 × 4-lane MIPI connectors (camera or display) |
| Power Requirement | 5V / 5A via USB-C (27W recommended) |
| Release Year | 2023 |

Note: ChatGPT was used to assist with code development and Raspberry Pi setup.

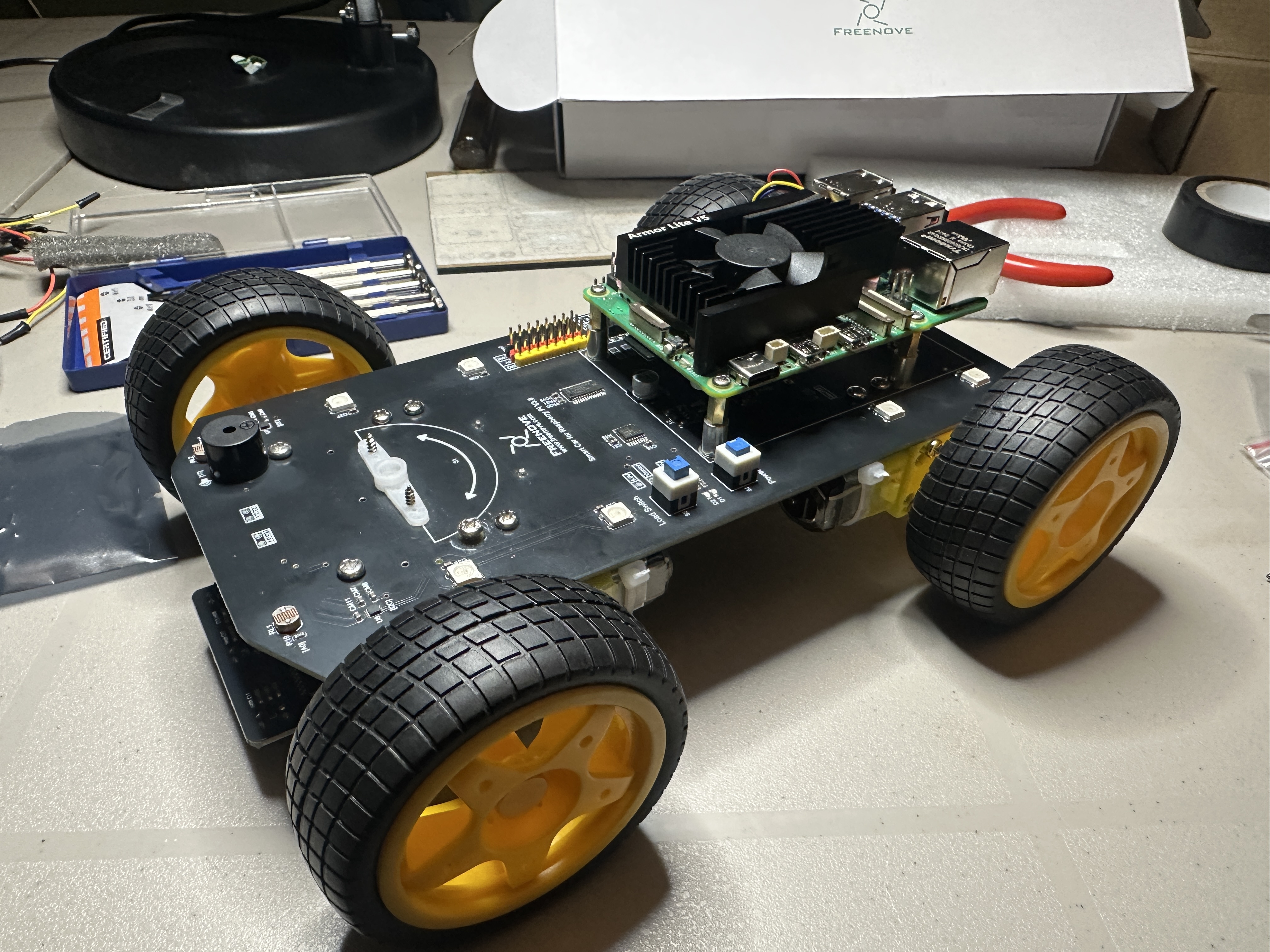
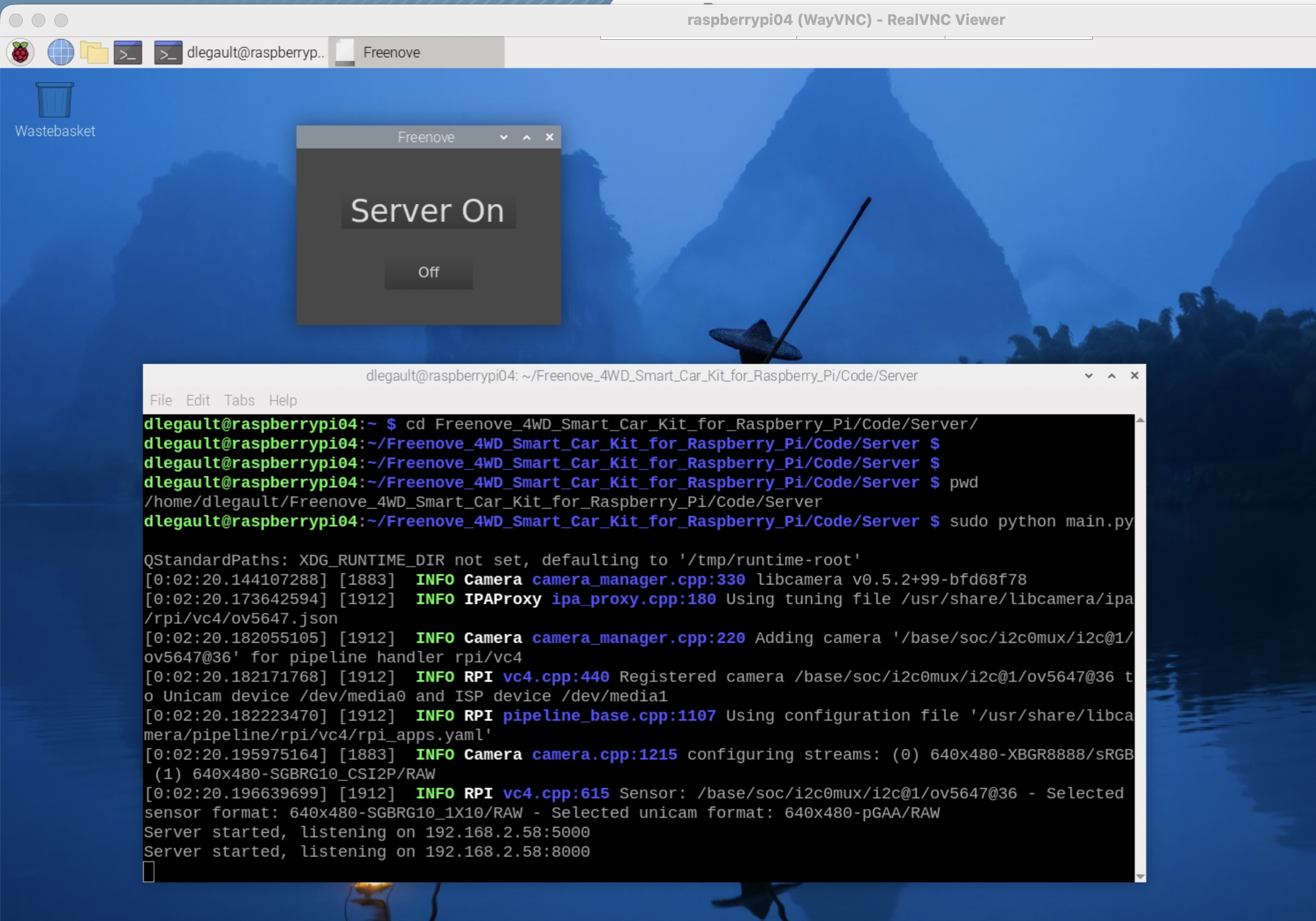
Motor test using python script provided by Freenove in GitHub.
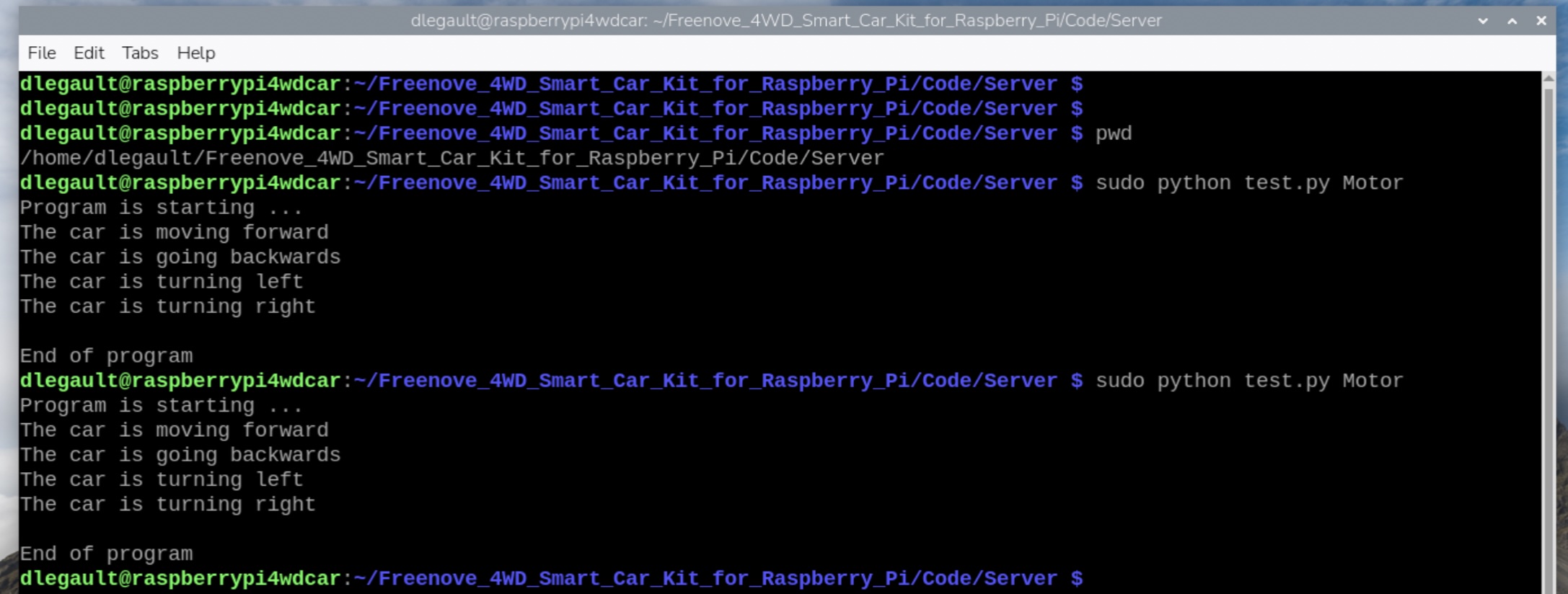
Connected to 4WD car using VNCviewer to run motor test.
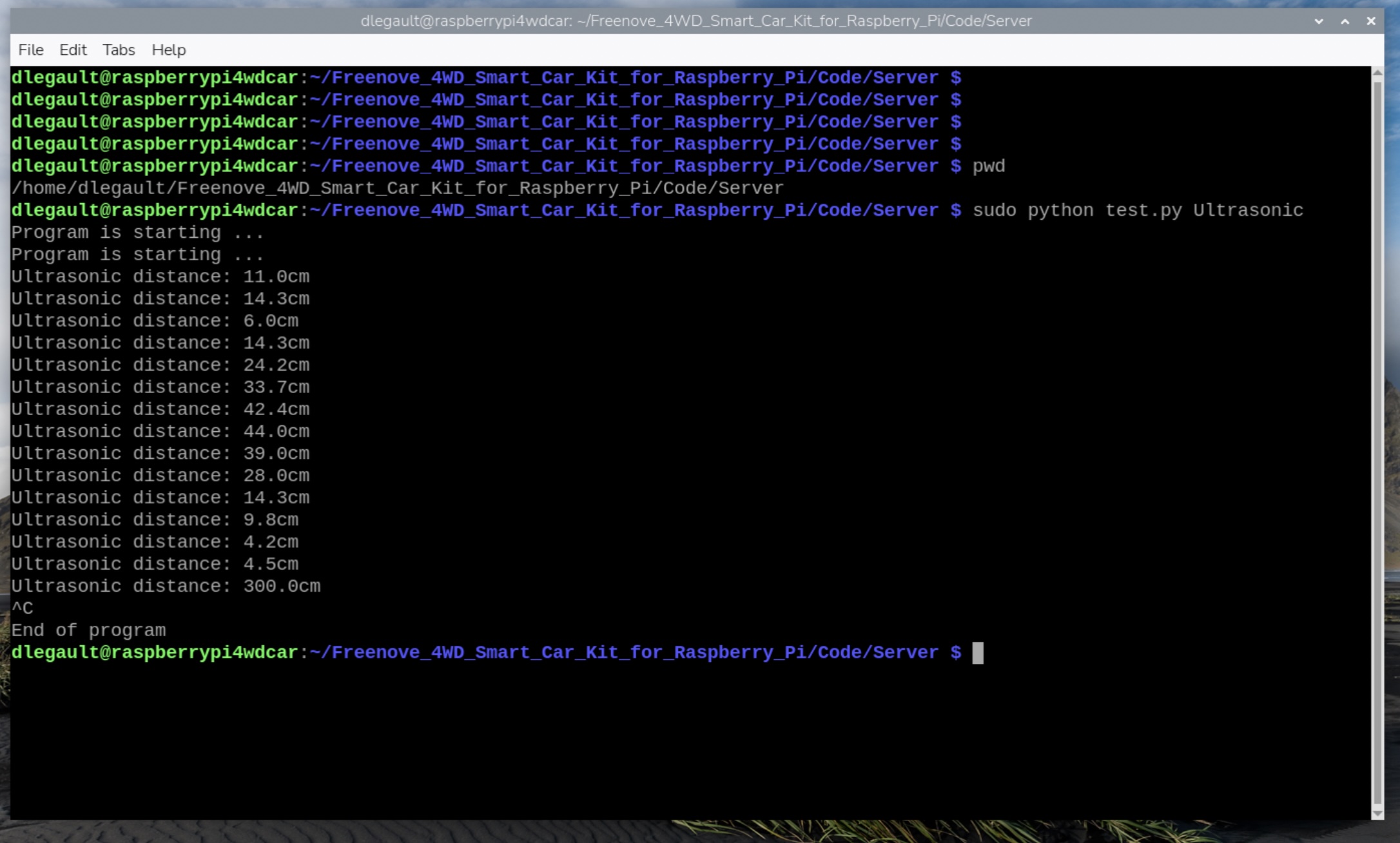
Ultrasonic test, calculates distance. Moving my hand away/close. 300CM when I moved my hand away, max when no objects in front of sensor. Ultrasonic sensors can be used for obstacle avoidance when self driving.
Other tests performed and passed: voltage test, camera test, infrared line tracking, buzzer/horn.
LED test failed. But LEDs are cosmetic. Does not affect functionality of the car.
Investigation into LED issue, I ran into an issue controlling the onboard WS2812 (NeoPixel) LEDs using a Raspberry Pi 5. The LEDs would partially light or behave unpredictably, suggesting a timing-related problem rather than a hardware fault.
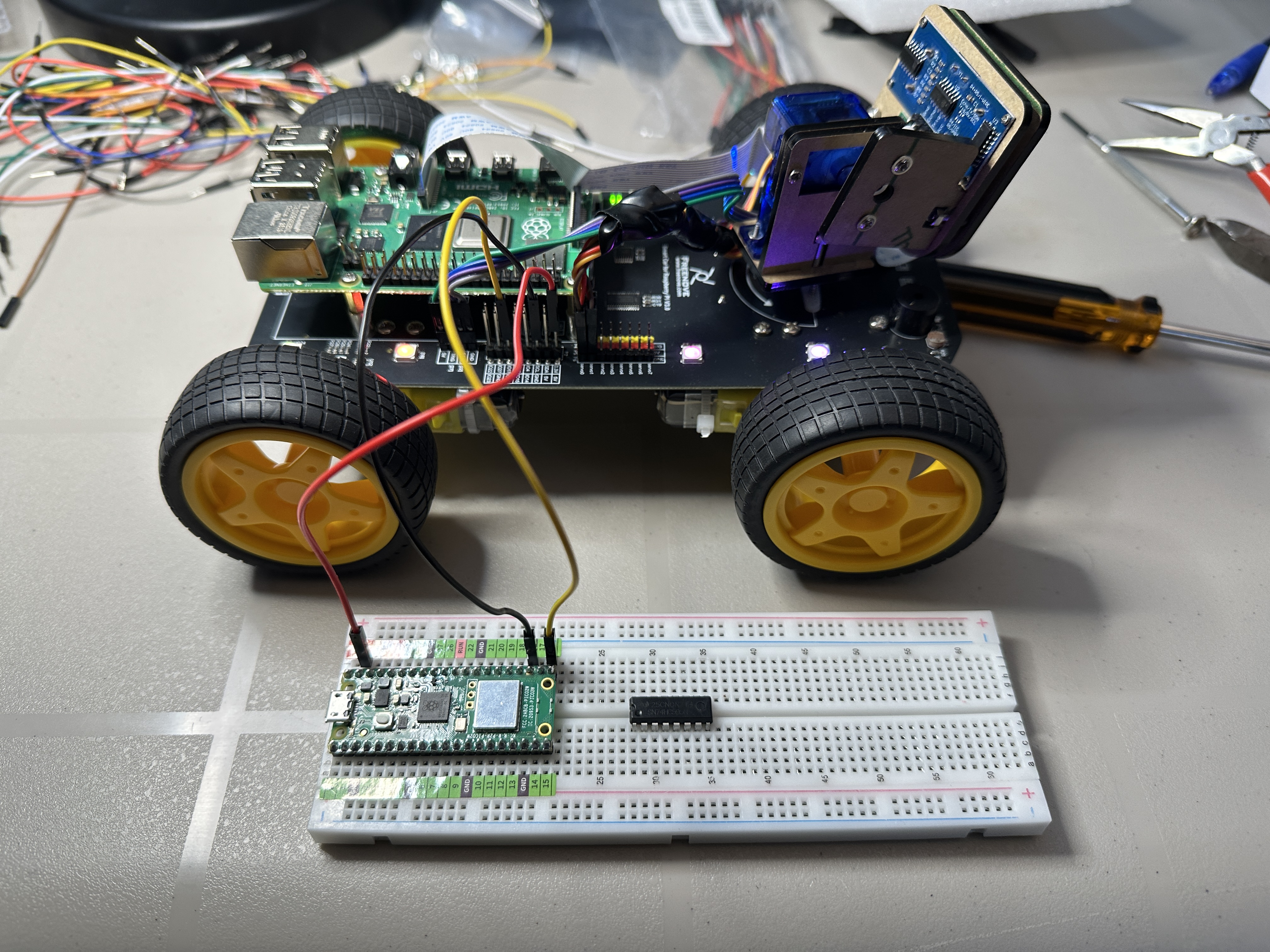
After learning more about how WS2812 LEDs work — specifically their strict 800 kHz pulse-width timing requirements — I experimented with using a Raspberry Pi Pico 2 W instead of the Raspberry Pi 5.
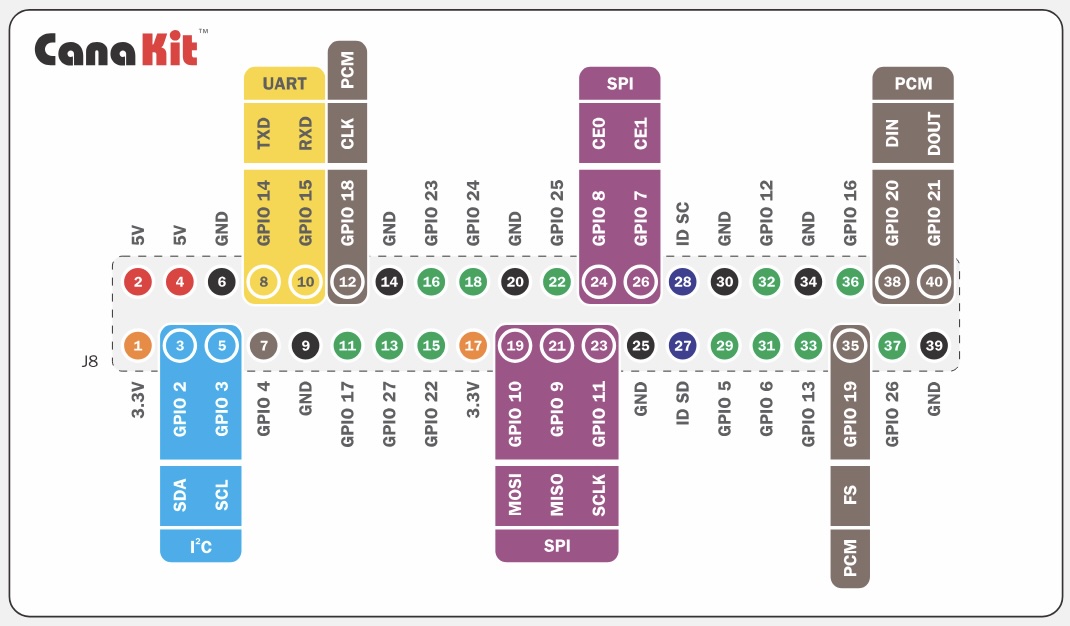
I disconnected the Pi 5 from the LED data line (GPIO10 on PCB V2.0) and connected the Pico directly to the WS2812 data input. Using the Pico’s PIO (Programmable I/O) hardware, I was able to generate precise timing signals and successfully control all 8 LEDs, including smooth animations such as rainbow effects and a Knight Rider scanner pattern.
This experiment proved that:
- The LED hardware and wiring were functioning correctly.
- The issue was not power-related.
- The problem was due to timing sensitivity when generating the WS2812 signal from Linux on the Raspberry Pi 5.
By offloading LED control to the Pico — a microcontroller designed for deterministic, real-time signal generation — the LEDs operated flawlessly.
Use a microcontroller for precise timing tasks, and a Linux-based system for high-level control and networking.
The Pico could be used as a dedicated LED coprocessor for the 4WD car.
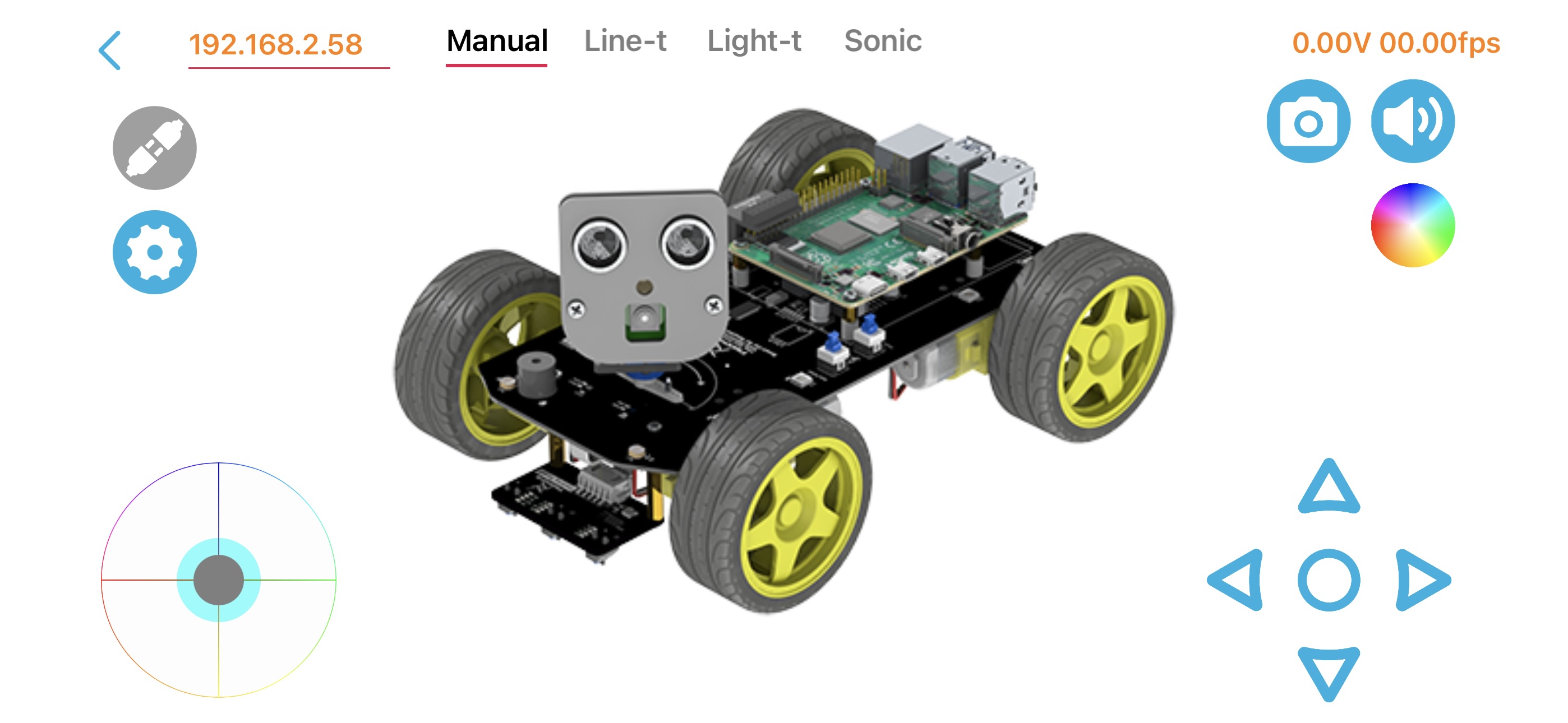
Freenove Client on iPhone to control the car. Android client available.

Freenove Client running on Raspberry Pi (Raspberry Pi OS / Debian Linux) to control the car. Client available for Windows and macOS.
Autonomous Driving Experiment
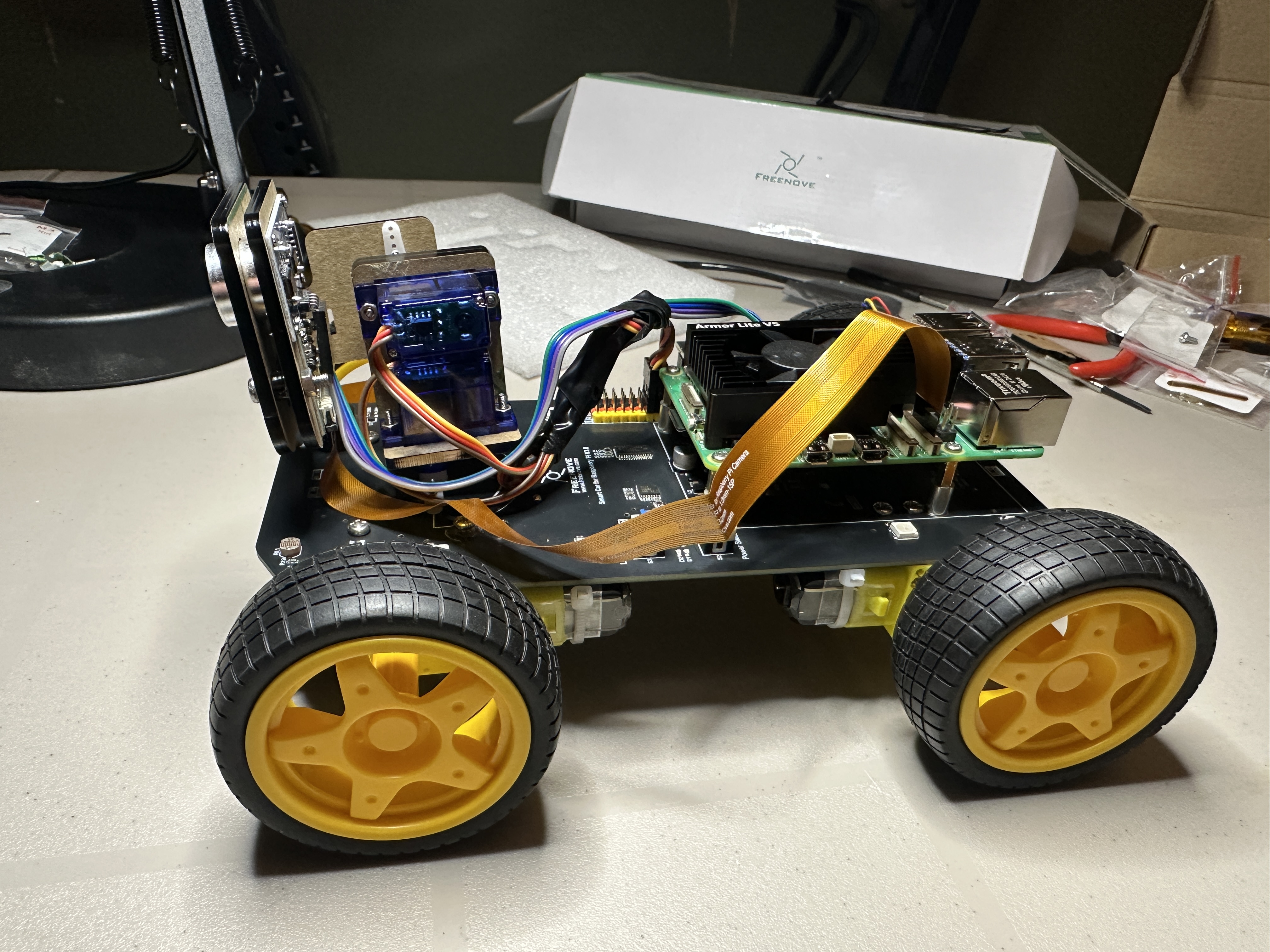
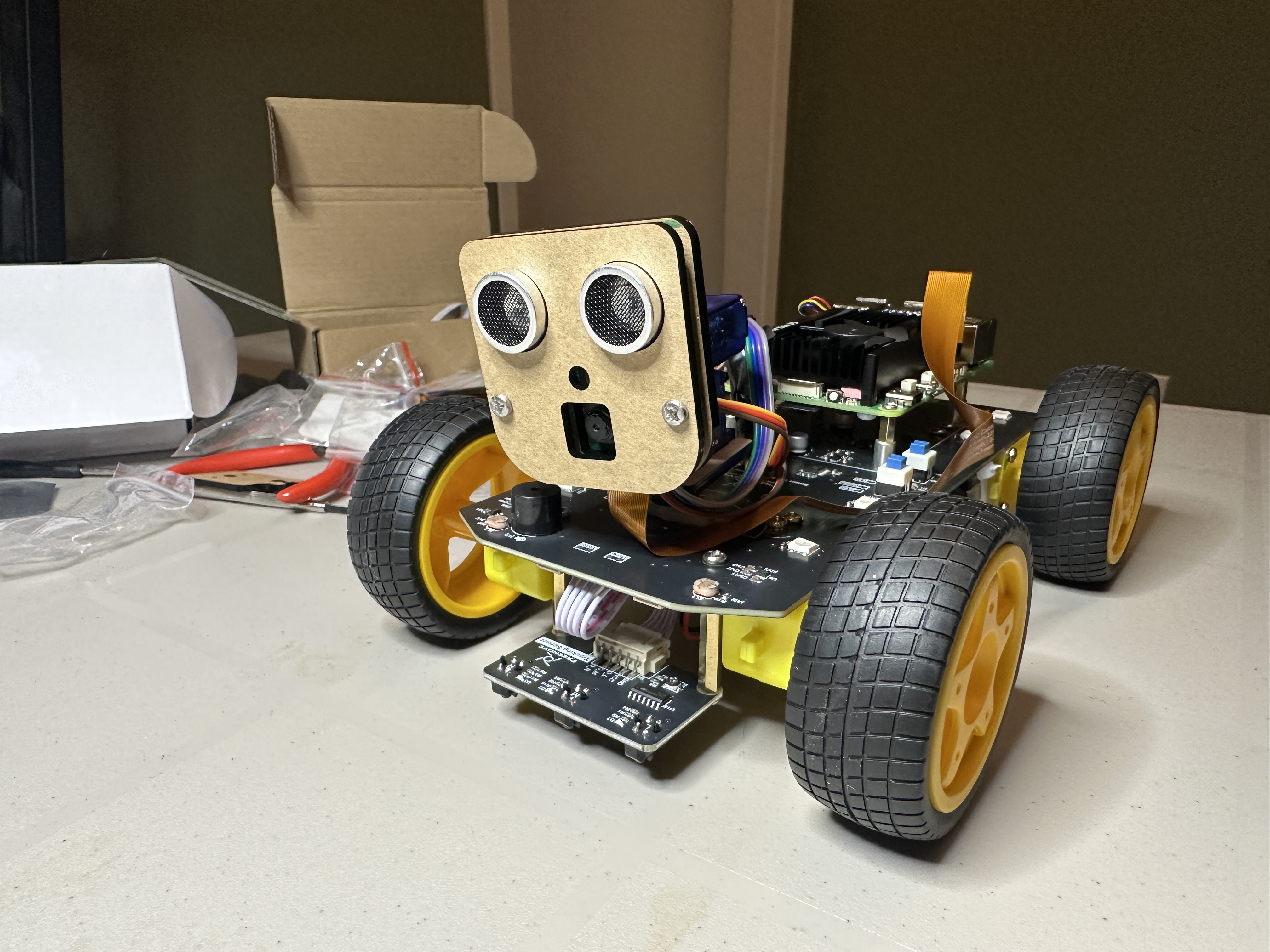
This version of the 4WD Smart Car uses an ultrasonic sensor for basic obstacle detection and autonomous driving. The car continuously measures distance to objects in front of it and attempts to stop or turn when an obstacle is detected.
At the moment, the system still requires tuning. The car sometimes collides with walls before stopping and does not always turn far enough to fully avoid obstacles, which can cause it to become stuck (a classic robotics moment).
Planned improvements include:
- Reducing forward speed to improve stopping distance
- Increasing turn angle or turn duration when obstacles are detected
- Refining distance thresholds for earlier response
This project highlights an important lesson in robotics: control logic, timing, and mechanical behavior must be tuned together to achieve reliable autonomous navigation.